Software Components
There are three major software components involved in the operation of ArduSub:
- ArduSub: ArduSub is the autopilot software responsible for processing pilot input and controlling the ROV. ArduSub is the 'brains' of the ROV.
- QGroundControl: QGroundControl is the user interface for operating the ROV.
- Companion: The Raspberry Pi Companion Computer runs software that relays communications between the autopilot and QGroundControl via Ethernet communications. The Companion software also streams HD video to QGroundControl.
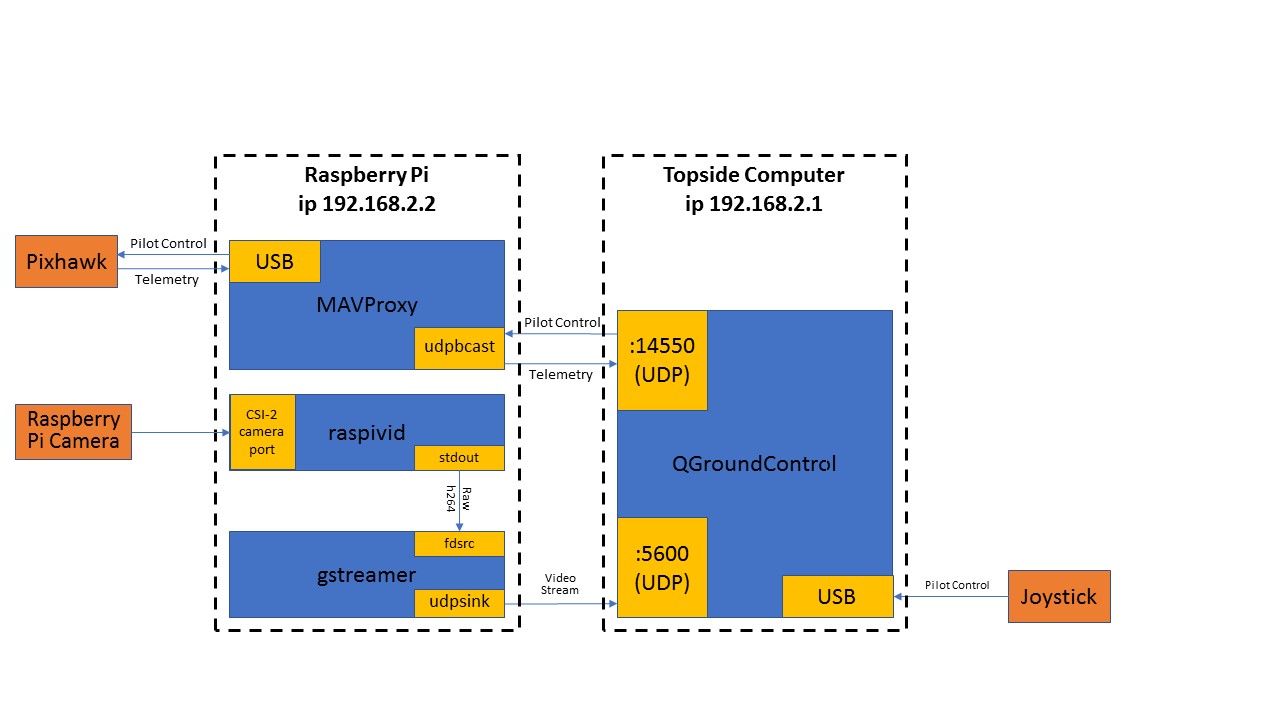
Here is a typical diagram of the software components and their interactions:
Sponsored by Blue Robotics. Code released under the GPLv3 License. Documentation released under the CC-NC-SA 4.0.
Submit a Documentation GitHub Issue here to report any errors, suggestions, or missing information in this documentation.
Submit an ArduSub GitHub Issue here to report issues with the ArduSub software.