



{kind=link}
{kind=link}
{kind=link}
{kind=link}
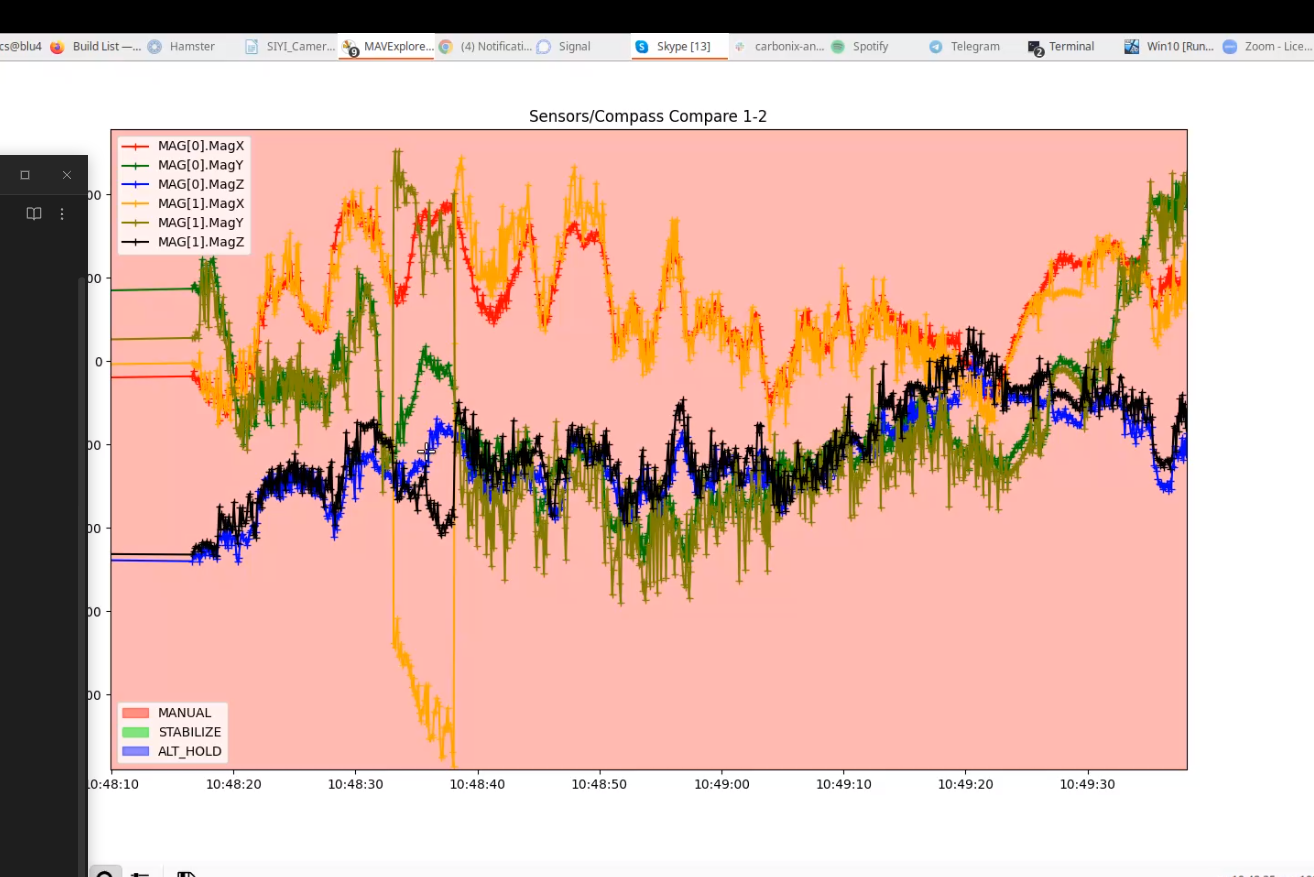
Diagnosing and fixing yaw drift
Chat with Tridge:
It is clearly visible in some logs:

We need to provide location for the EKF to be happy. Provide a parameter for backup location.
We need to deal with magnetic interference, tuning for all motors needs to me implemented
We can try decreasing the MAG NSE parameters, or gates, to rely heavier on compass than Gyros
The proposed solution
Create HOME_LAT and HOME_LON parameters in ArduSub.
New solution:
allow estimating earth frame fields with no gps
These are apparently already use in AP_Beacon.
this is apparently easily doable with a script, which should help diagnosing
from devcall:
line 669 or NAVEKF control
check logs, look if z gyro bias is updating
this is on old drifting logs
make an autotest. disable gps test
add z gyro bias
other notes:
- WMM is only populated if Compass Scale is set (full gps-enabled calibration)
- WMM is only populated if AUTO_DEC is on
- let's try INS_GYR_CAL set to 0 (NEVER)
Debbugin session started at june 10th:
let's keep track of my train of toughts.
- I made a test for GBIAS and GBIAS estimation. works fine in SITL
- GBIAS_P_NSE is limited in code to 0.5
-